| .. | ||
| assets | ||
| bazar | ||
| cad-abb-3kw-40d | ||
| cad-kuga | ||
| cad-robot-abb-3kw | ||
| drawings | ||
| firmware | ||
| laser | ||
| media | ||
| ref | ||
| renderings | ||
| research | ||
| resources | ||
| software | ||
| templates/shared | ||
| vendor | ||
| .gitignore | ||
| cad-report-Default.json | ||
| cad-report.json | ||
| config.json | ||
| config.yaml | ||
| License.txt | ||
| parts.xlsx | ||
| readme-2.md | ||
| README.md | ||
| specs.xlsx | ||
Robot driven print systems
brief this is part of our work of PP OpenSource contributions, please check our library or our main page for more.
The print head is a modification of Lydia-v4 and aims at a generic solution for most of it´s components.
Status : Confirmed & in progress, ETA Mid. of October
Todos
- Motor selection
- Firmware updates
- Check TCP stack memory/CPU footprint on the ControllinoMega
- Sensors / Audio, LED feedback (status, etc... )
- Support RAPID - ABB robots, but uses customer spec
Todos Frederike@3dtreehouse
monday memo:
- Gantry mount plate, we need the size and locations of the mount holes. We'd need a test rig here.
- Location and size of the cabinet, what on the control panel (controls & plugs) ?
- We have to know how we share power source & ground among all digital circuits. Currently we're mostly at 24V and we need another source for 12V (fans, etc...)
- Clarify RAPID ethernet connectivity
- local setup / updates ?
- screw tip / max. barrel length / screw mod
- Fan control
Components
- OMRON MX2 VFD BOM
- 3G3MX2-A2015-E
- Controllino - Mega as already mentioned a few times, adds 280 Euro
- a better motor and gearbox - MotoVario
- custom firmware development
- ModBus capable PID controllers (3x) : Omron - E5DC-B - Din - Rail Module BOM
- Hopper - Linear Solenoid
- Motor Cidepa - CFM-37.3 1/35 1 | 750W | 1.2SF
Noah OS Variant
Specs
- Voltage : 220V|380V
- Max. 120Kg, first rev. might be around 60KG
- Controller cable length around 20 meter
- PID : +/- 5 degc tolerance, alarm/cooling outputs
Gantry Mount
- : run static tests
- the tool flange is on p30, (see also ATI Toolchanger - YuTu)
- Why ATI Manual Tool Changers?
- we need a laser cut barrel shield which holds the insulation material
- on the barrel tip, we need some mounting possibilties for fans which are a little heavy as well
- ATI mount (see ATI Tool changers @ 3dcentral)
Firmware
(https://www.controllino.biz/product/controllino-mega/) which gives us Ethernet and RS485. The board has been proven reliable and robust (ideal for prototyping).
- [-] VFD and PID control is mapped to Serial communication which might accept G-Code
- VFD will be Omron-M2X series since we can use existing code. The VFD also supports Modbus (rather difficult)
- Internal registers/coils (custom PlasticHub Firmware) to Modbus rep
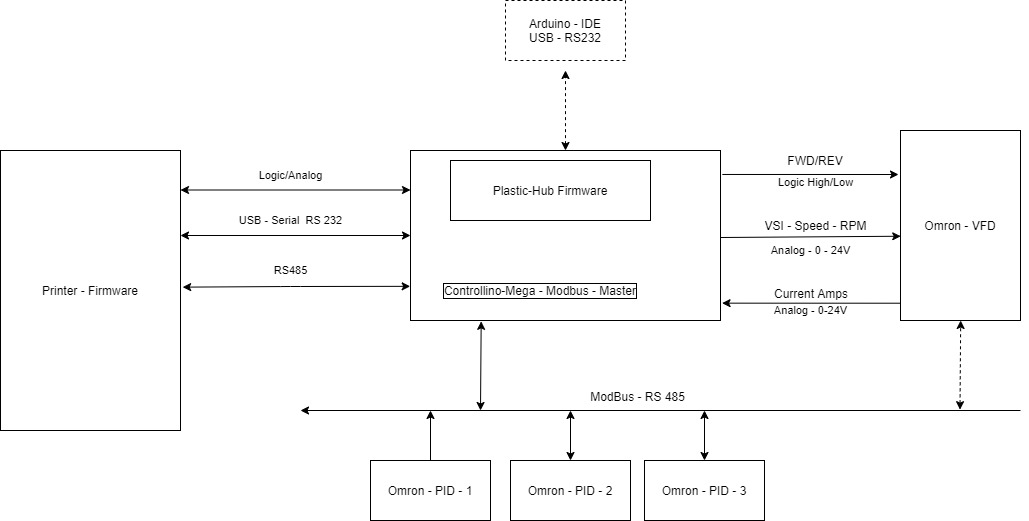
PID Controller
-
We should go for Omron E5-C series which come with Modbus (consider EMI and cable length to the main controller)
-
Each PID will be exposed on the internal ModBus mapping
-
There is currently a custom PID controller in development but as mentioned, it's unlikely that it sees the light before November. However, I can imagine we use sub-routines as they're avaiable
-
[-] We should create logging module as well a an API to set temperature profiles for different materials. The logging module will help analyzing different PID settings as well experimenting with barrel cooling (when overshooting becomes an issue).
-
[-] Additional, we forward alarms for overshooting on the internal bus
-
Changes : Turns out that the E5DC / E5DC-B family is better choice.

Barrel
- [-] OD should be standard to EU heatbands
- Between Nozzel and barrel we might have some adaptery to exchange different screw tips, up to 10 cm
- should have a mount near the nozzle
- Barrel - motor flange should have some redunancy to enable different barrels
- Taper bearing - 52OD - 30ID | 17H
Hopper interface and Hopper
- should have a thread interface
- integrate loader system
Todos
- Investigate Omron - PID feedback to enable more control via M/G codes (purge, ...)
- Investigate GCode to ROS mapping
- Investigate screw tip machining, if lucky we get away with 4 axis
- [-] Test different VFD/PID checksum/parity settings with larger EMI around
References
ROS (cancelled)
Low - Tech
ProfiBus
Related Projects
Cable robotics
- The Cable-robot Analysis and Simulation Platform for Research (CASPR)
- CUHK C3 Robotics Laboratory - Youtube
Rapid - ABB
ABB 6600

- ABB - IRC - 5 - Controller
- [ABB - IRC - 5 Manuals](./vendor/abb/IRC5_Operating manual_Trouble shooting_3HAC020738-001_revK_en.pdf)
- [ABB - IRC - Datasheet](./vendor/abb/IRC5-Industrial-Robot-Controller-data sheet.PDF)
- ABB irb 6600 175-2.8
- [ABB irb 6600 175 - 2.8 - Local](./vendor/abb/IRB_6600_R_US 02_05.pdf)
- ABB 660 - Specs
- ABB Robotstudio Downloads
Project links
Follow ups
- calc. energy overhead, per printed kg of plastic
- calc. min. invest to print obvious products
- investigate possible OS verticals
- develop generic system & functional design for v2.0 candidats, for 6D robots but also cable driven 3D systems
- check displacement options for segmented prints, (cheap floor track system?)
- check material remove options (see ATIish tool changers YT)
Kuka
https://github.com/ros-industrial/kuka_experimental/tree/melodic-devel/kuka_kr150_support/